Here you can see some of my engineering projects.
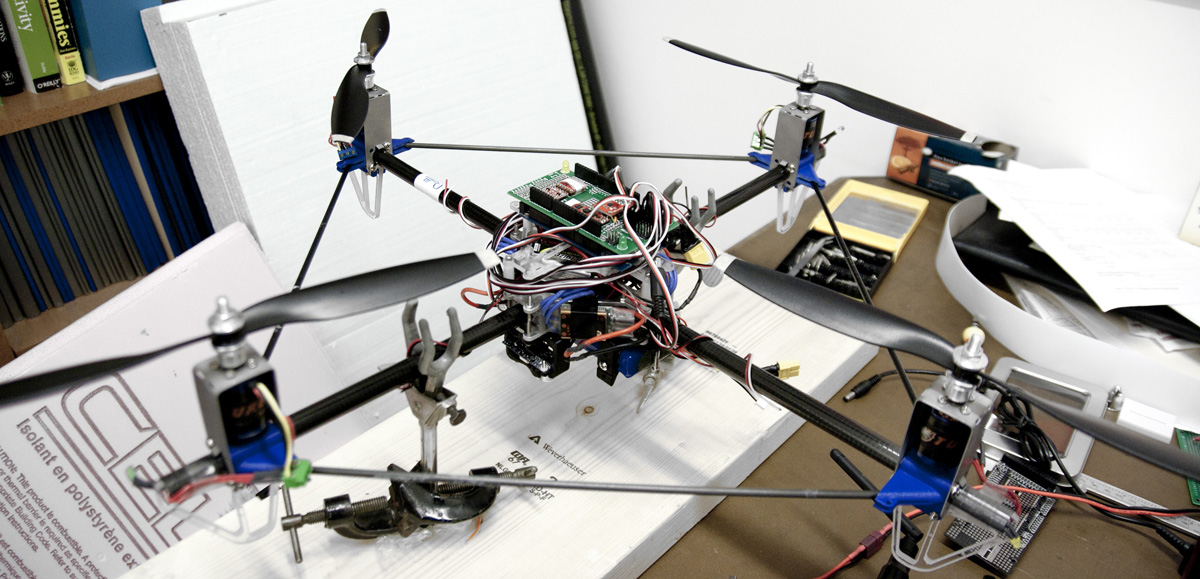
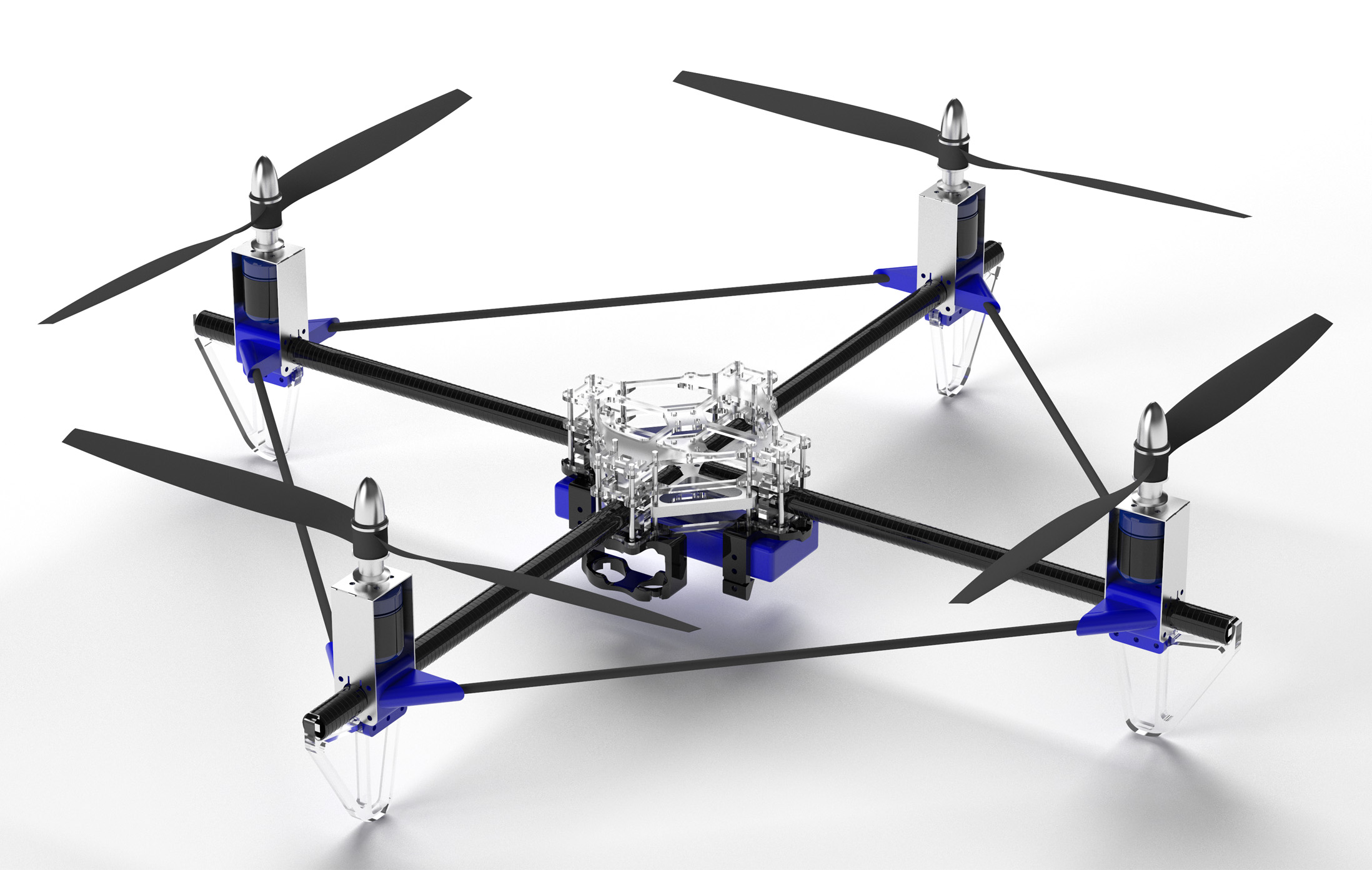
Quaffle
January - April 2012
Quaffle is an autonomous quadrotor flying robot. The robot uses an Arduino Mega 2560 processor. The inertial measurement unit is a SPA 9DoF chip with nine degrees of freedom. The chassis is completely custom-designed and is constructed from carbon-fibre tubes, 3D printed ABS thermoplastic, and a small amount of sheet metal cut using a waterjet machine.
The robot is being built by a team of three: Anson Liang, Richard Lee, and myself. The project is for the ENPH 459 (Engineering Physics Project I) course work.
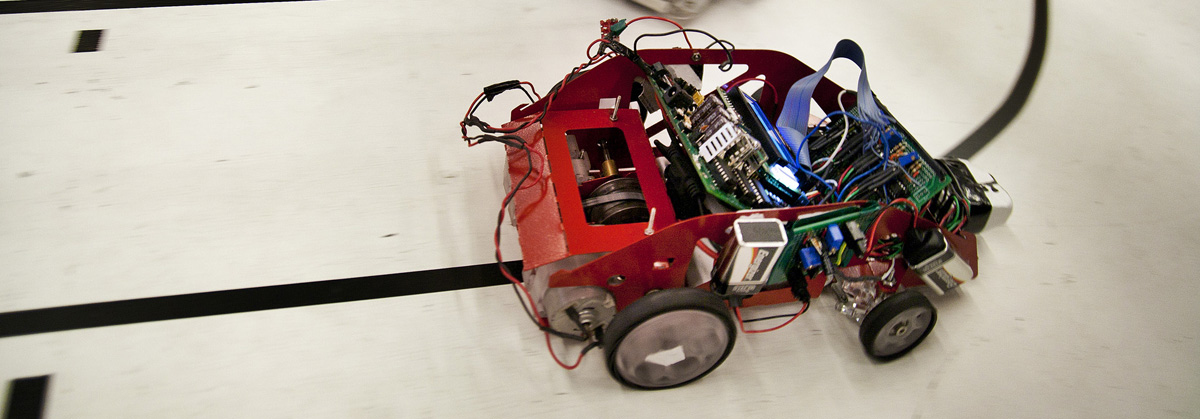
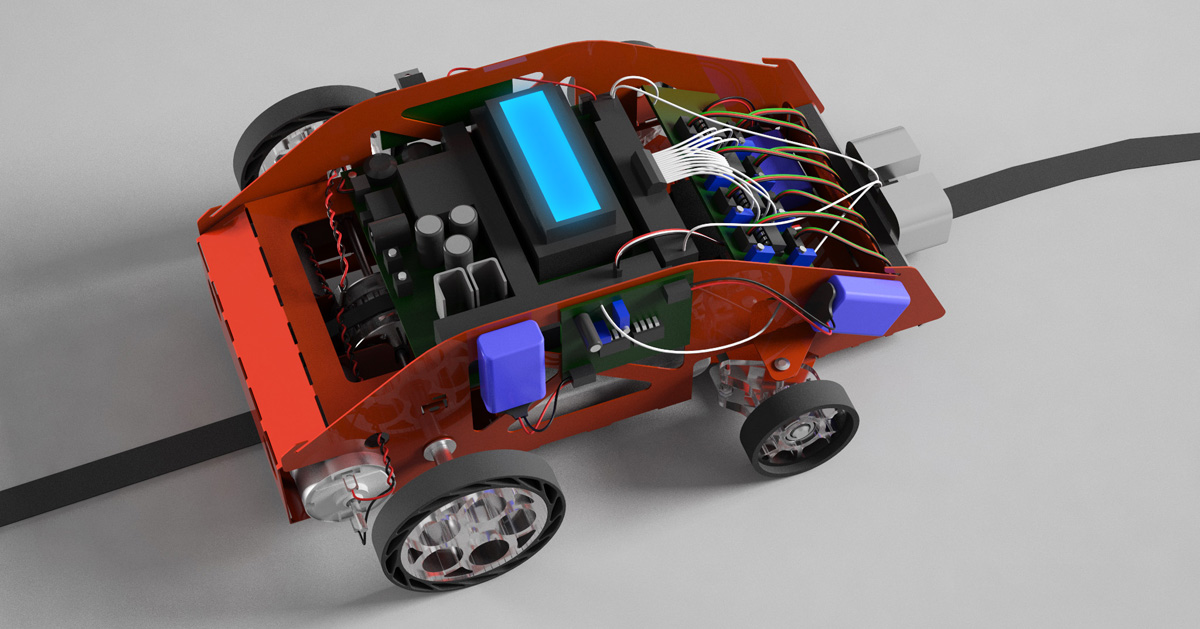
Gadget
May-August 2010
Gadget is an fully autonomous robot designed to follow an ordinary black tape on a white surface at high speed. It uses eight QRD 1114 brightness sensors to track the position of the tape. All computation is done by a UBC TINAH board featuring an ATMega 128 processor.
Gadget was designed and fabricated from scratch and features many interesting mechanical design choices to improve its performance. The chassis is monocoque sheet steel cut using a waterjet machine. The steering is an Ackermann geometry steering that is controlled by a servo motor; the two rear wheels are driven by a custom made differential gear that is belt-driven by two motors. Gadget also has an infrared rangefinder in the front to detect obstacles, which it may avoid.
The robot was completed by a team of four: Adrien Emery, Billy Fung, Russell Vanderhout, and myself. The project was for the ENPH 253 (Introduction to Instrument Design) course work and Gadget competed in the 10th Annual Engineering Physics Roborace. Learn more about Gadget »