Quaffle
2012/01 – 2012/04
1 Introduction
Quaffle is a quadrotor flying robot. It uses an Arduino Mega 2560 processor. The inertial measurement unit is an SPA 9DoF chip. The chassis is completely custom-designed and is constructed from carbon-fibre tubes, 3D printed ABS thermoplastic, and a small amount of sheet metal cut using a waterjet machine.
The robot was built as a team of three: Anson Liang, Richard Lee, and myself. The project was for the ENPH 459 (Engineering Physics Project I) course work.
The original intention was for fully autonomous flight using a wireless camera mounted beneath the quadrotor, which streams video to an external laptop computer that sends flight commands to the quadrotor. However, due to lack of time, we were unable to achieve this objective. Nonetheless, we have an awesome quadrotor.
2 Mechanical design
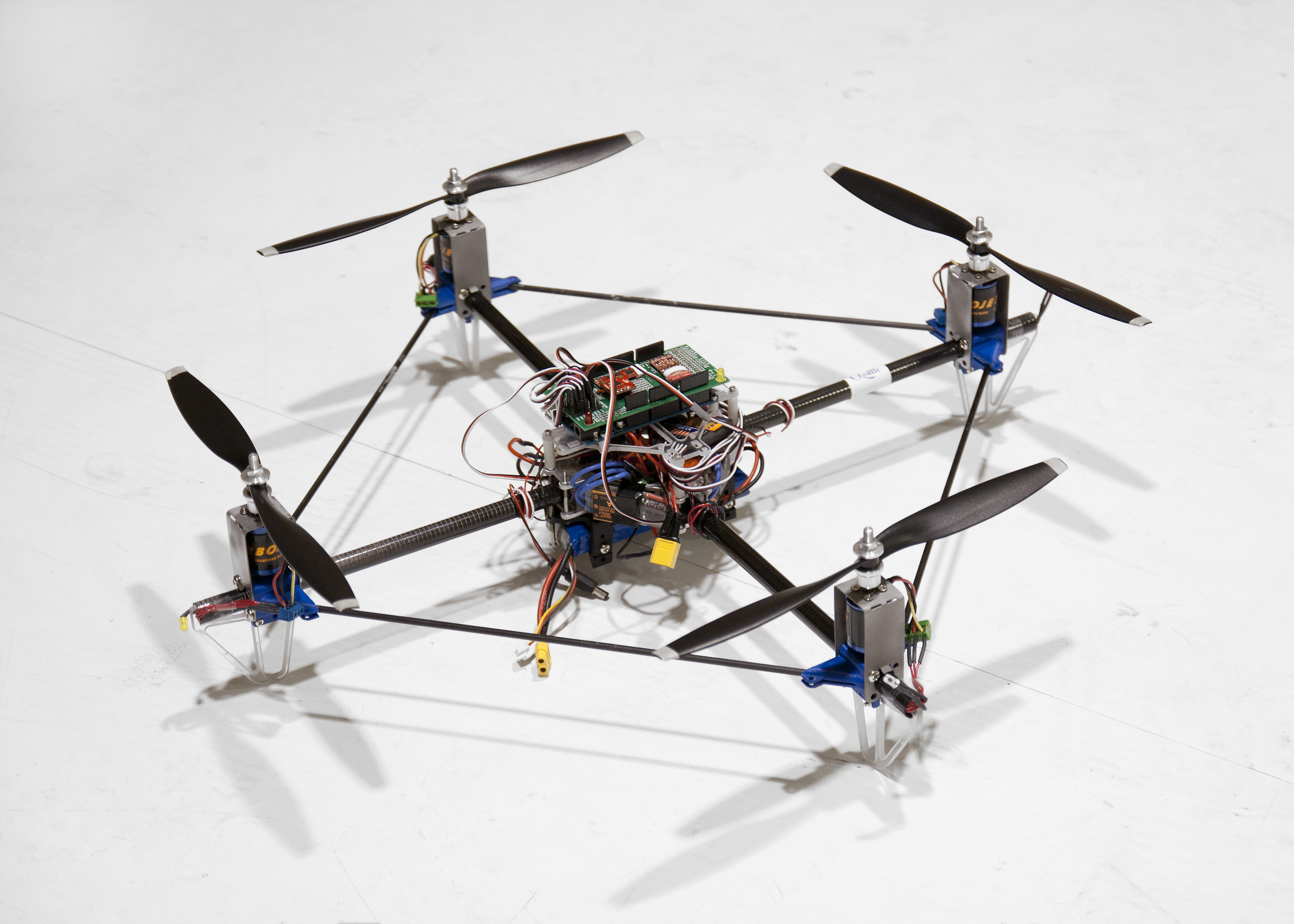
The scale of the quadrotor is comparable to commercial remote-controlled aircraft, at about 50 cm wide. Using lightweight components such as carbon fibre chassis and lithium polymer battery, the quadrotor weighs 1.3 kg fully loaded.
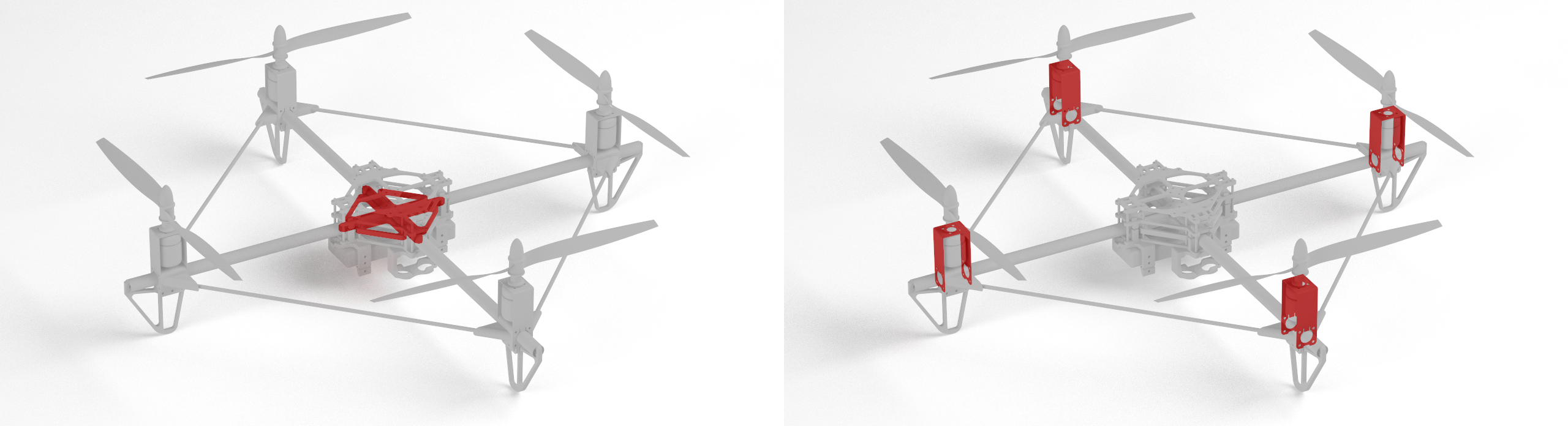
The chassis of Quaffle was designed to be rigid but lightweight. It consists primarily of carbon fibre tubes connected at the corners by 3D printed plastic parts and at the centre by polycarbonate and aluminium components fabricated using an OMAX waterjet cutter. The design emphasizes modularity and scalability as well as low cost and ease of fabrication and assembly. The size of the quadrotor can be easily changed by using carbon fibre tubes of different lengths, and the central assembly can be expanded to install additional instruments by simply adding more layers on top.
2.1 Carbon fibre tubes
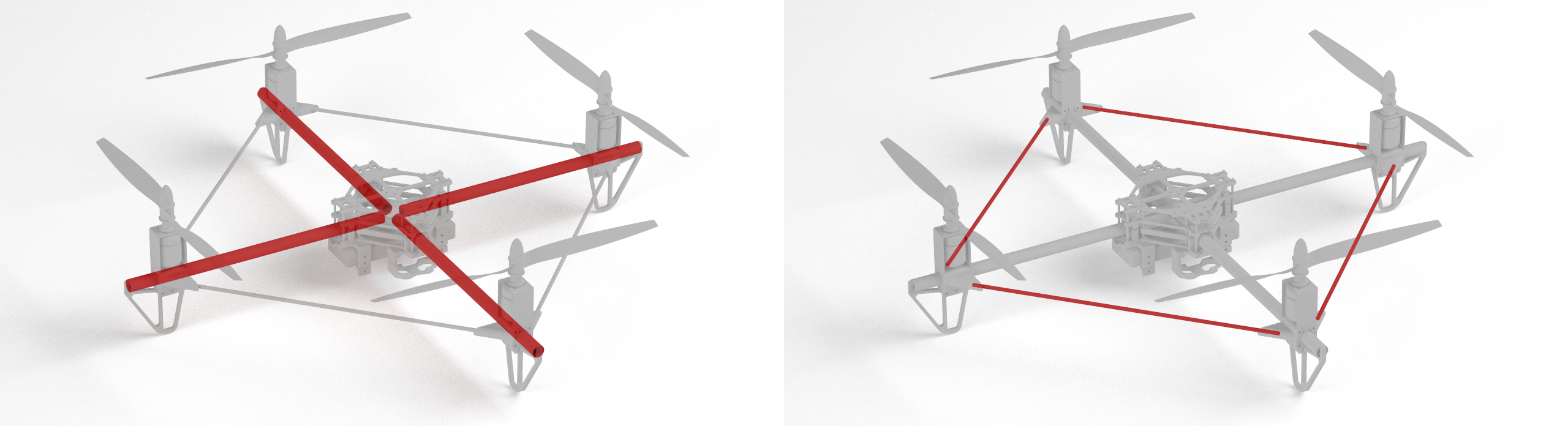
The four arms of Quaffle are carbon fibre tubes, selected because of their strength and light weight. Quaffle uses two different types of circular carbon fibre tubes: the thicker type is used for the main quadrotor arms, and thin auxiliary tubes connect the arms to each other. The four arms are cellophane-wrapped unidirectional carbon fibre tubes with an outer diameter of 14.04 mm and an inner diameter of 12.45 mm. In between each pair of two adjacent arms, a thinner unidirectional carbon fibre tube of diameter 4.76 mm connects them near the end. The purpose of these tubes is twofold: They ensure the motors point upwards (which would otherwise be difficult due to the circular tube), and reduce vibration and improve rigidity.

| Property | Value |
|---|---|
| Density | 1.60 g/cc |
| Young’s modulus (axial) | 135 GPa |
| Young’s modulus (transverse) | 1 GPa |
| Ultimate tensile strength (axial) | 1500 MPa |
| Ultimate compressive strength (axial) | 1200 MPa |
| Ultimate tensile strength (transverse) | 50 MPa |
| Ultimate compressive strength (transverse) | 250 MPa |
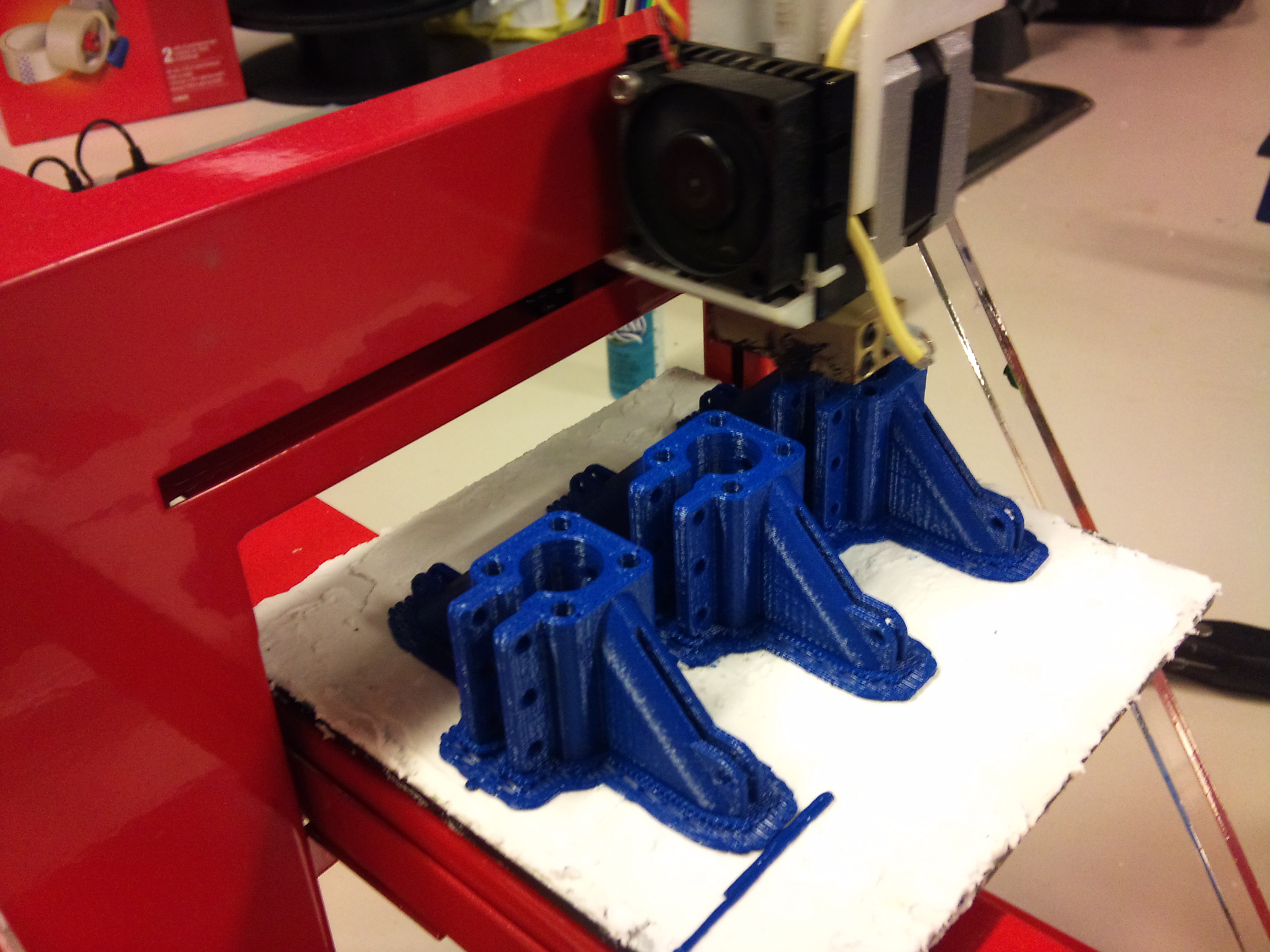
2.2 3D-printed components
Quaffle features several parts fabricated using a 3D printer.
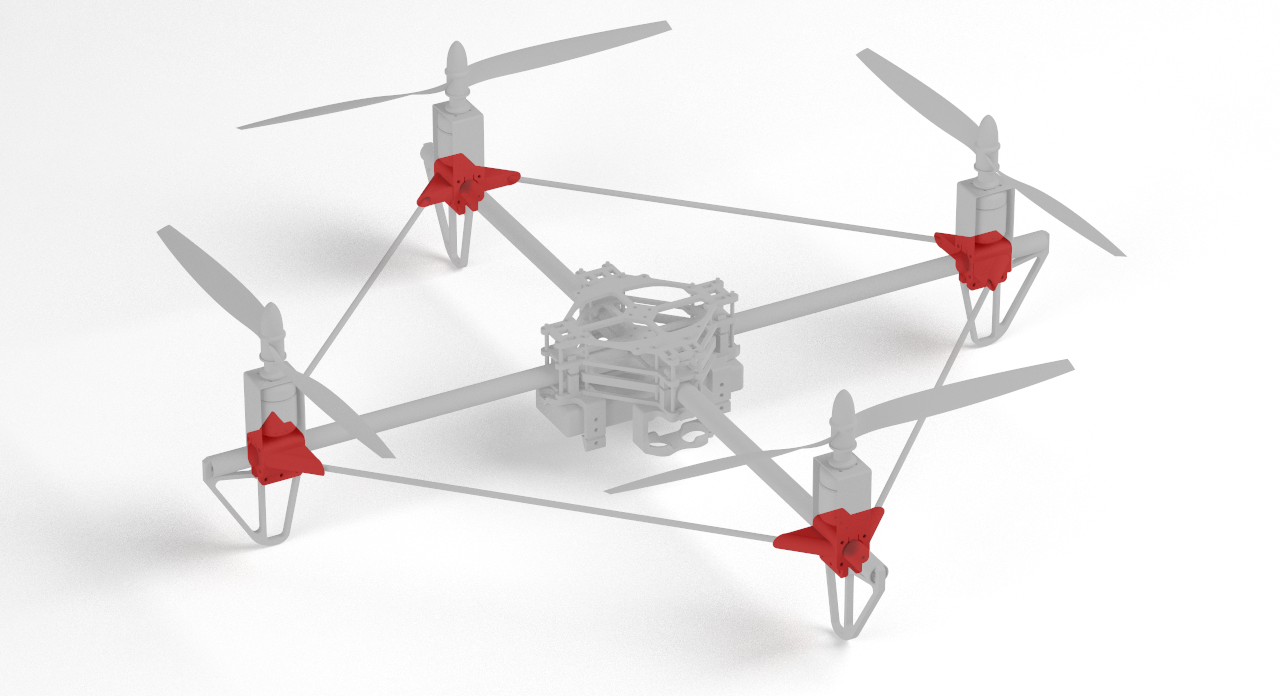
2.2.1 Corners
We used the PP3DP in the Engineering Physics Project Lab to create the “corners”, which connect the arms to the motor mount as well as to the auxiliary tubes.

2.2.2 Instrument mounts
The battery holder and the rangefinder mount were both 3D printed.
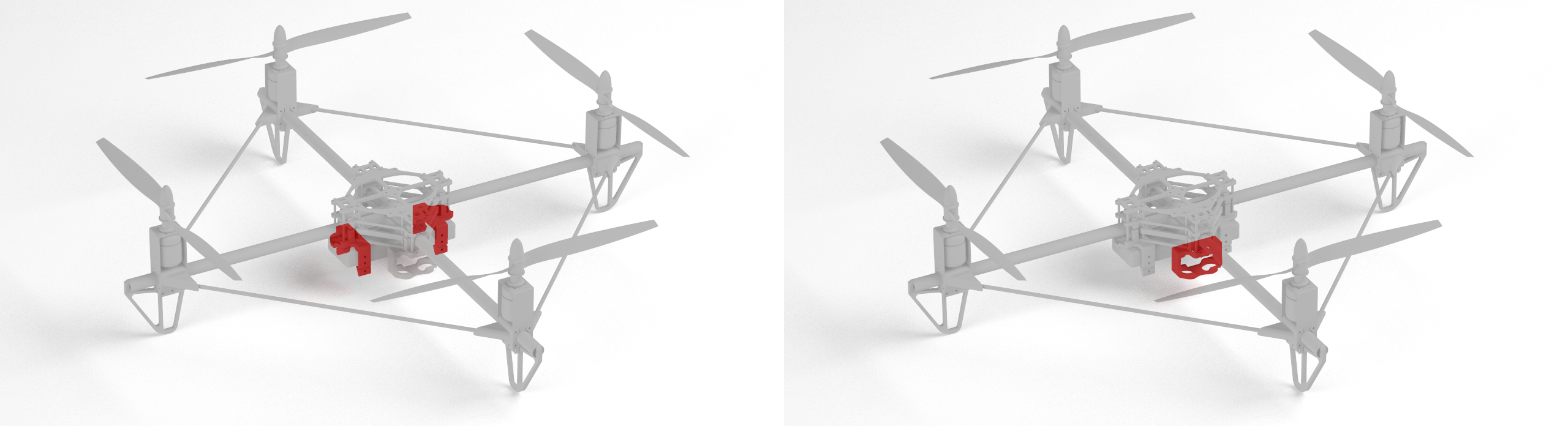
2.3 Polycarbonate components
Polycarbonate parts were used in both the central assembly for mounting electronic circuits, as well as on the corners as landing gear. We used 3–6 mm thick polycarbonate cut using the waterjet cutter.
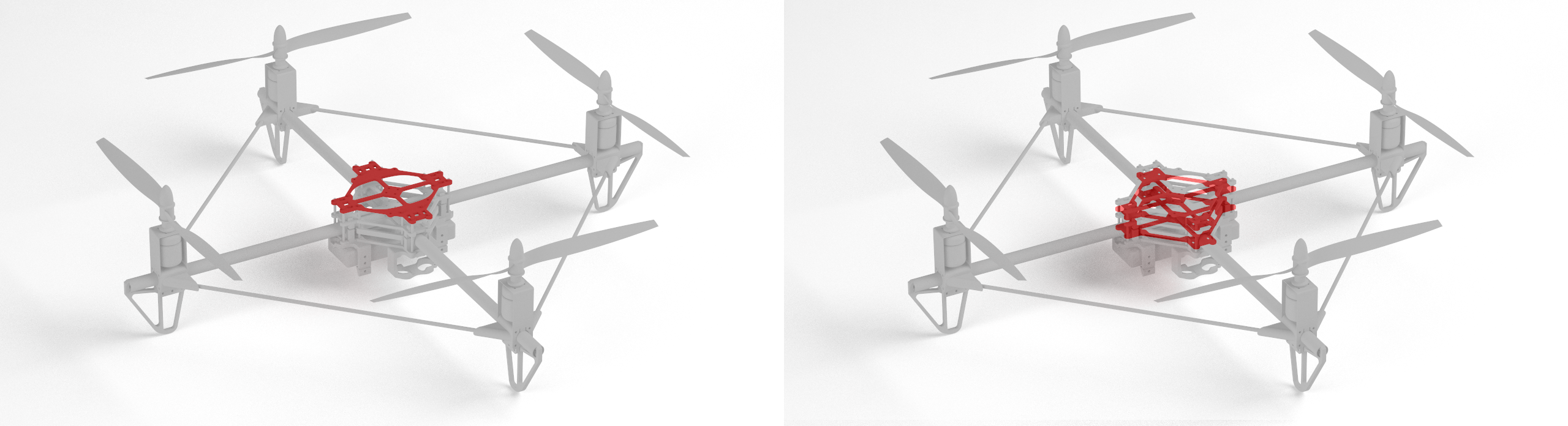


2.4 Metal components
The use of metal was kept to a minimum to minimise weight, except in places where the strength and rigidity of metal is needed. These include the motor mounts (sheet steel) and the central core (aluminium), both cut using the waterjet cutter.
The motor mounts were cut from 20-gauge (0.75 mm thick) mild steel and the aluminium core was made from 4.8 mm thick aluminium.
3 Electronic components
3.1 Arduino Mega 2560 microcontroller
We used the Arduino Mega 2560 microcontroller because of the large amount of available software for it. It is a popular platform for hobbyist micro aerial vehicles.

3.2 Inertial measurement unit
The inertial measurement unit in Quaffle is a SparkFun 9 degrees of freedom IMU.
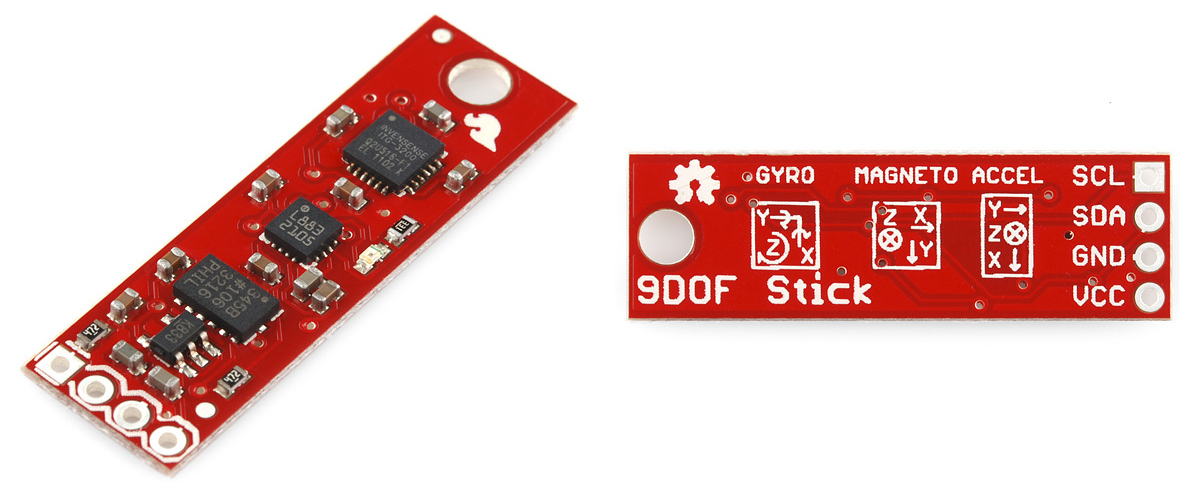
This chip interfaces with the Arduino through the I2C protocol.
3.3 AeroQuad shield
The AeroQuad shield v2.1 is used for interfacing with sensors and outputs.
4 Electric components
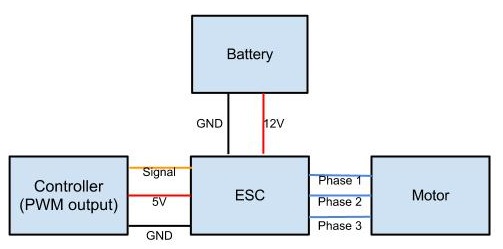
4.1 Motors and electric speed control
We used the Turbojet 880 KV brushless motor. This is a very powerful motor typical of micro aerial vehicles.

| PWM duty cycle | 25% | 50% | 75% | 100% |
|---|---|---|---|---|
| Current (A) | 1.5 | 6.1 | 14.2 | 20 |
| Power (W) | 17.5 | 70 | 160 | 210 |
| Thrust (g) | 230 | 650 | 1290 | 1380 |

4.2 Wireless communication
Quaffle can communicate with external devices using two methods. There is a 2.4 GHz remote controller to perform manual test flights. This is a HobbyKing remote controller with 7 channels. The other method is a Bluetooth shield for the Arduino.
4.3 Battery
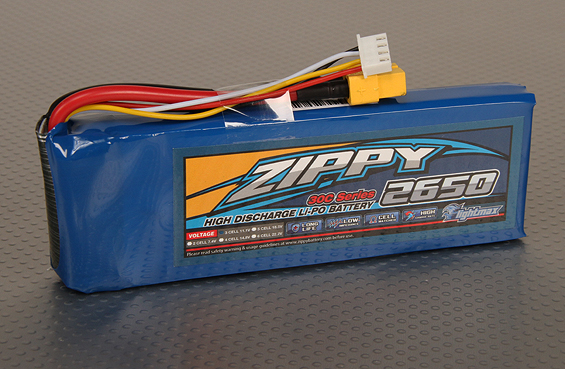
The battery is a typical lithium polymer battery. We used the 3-cell Zippy LiPo 11.1 V battery with 2650 mAh. This allows for 11 minutes of flight when the motors are drawing 15 A (in reality the motors will not be drawing so much current all the time).
4.4 Power distribution

5 Results
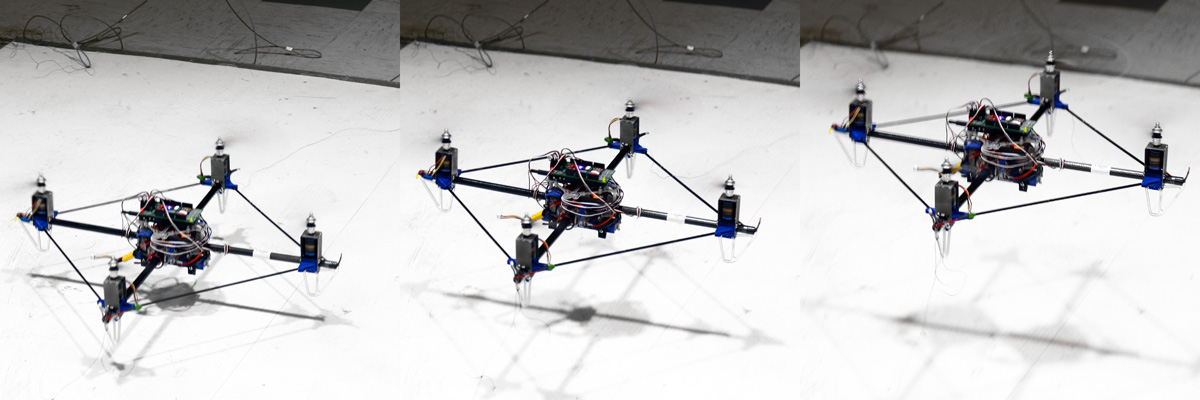
We achieved manual indoor flight, but due to lack of time, we did not get autonomous control to work. While it flies alright, we noticed some mechanical deficiencies, such as excessive vibration in the motor mount. The vibration caused a significant amount of noise in the IMU readings, making autonomous control difficult.
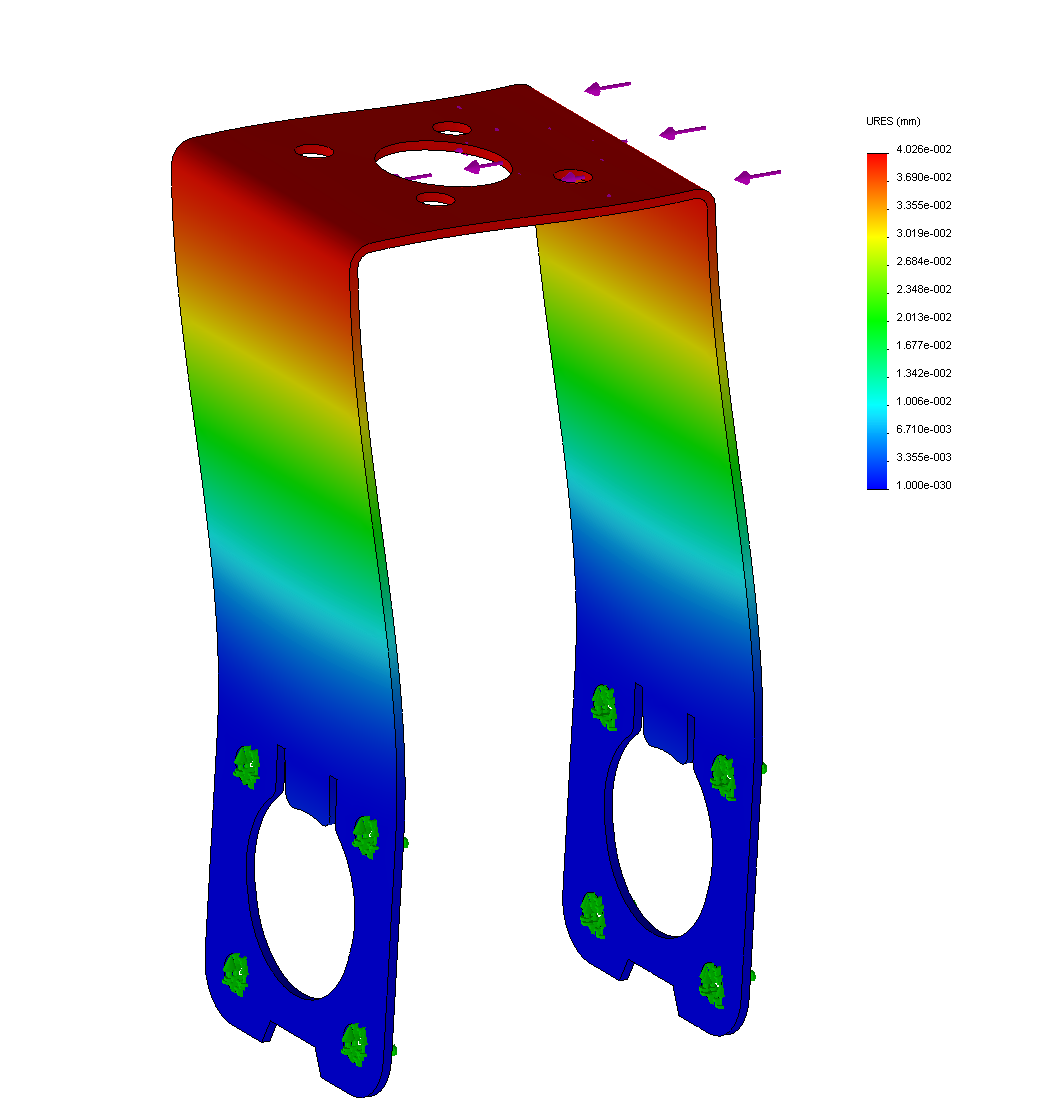
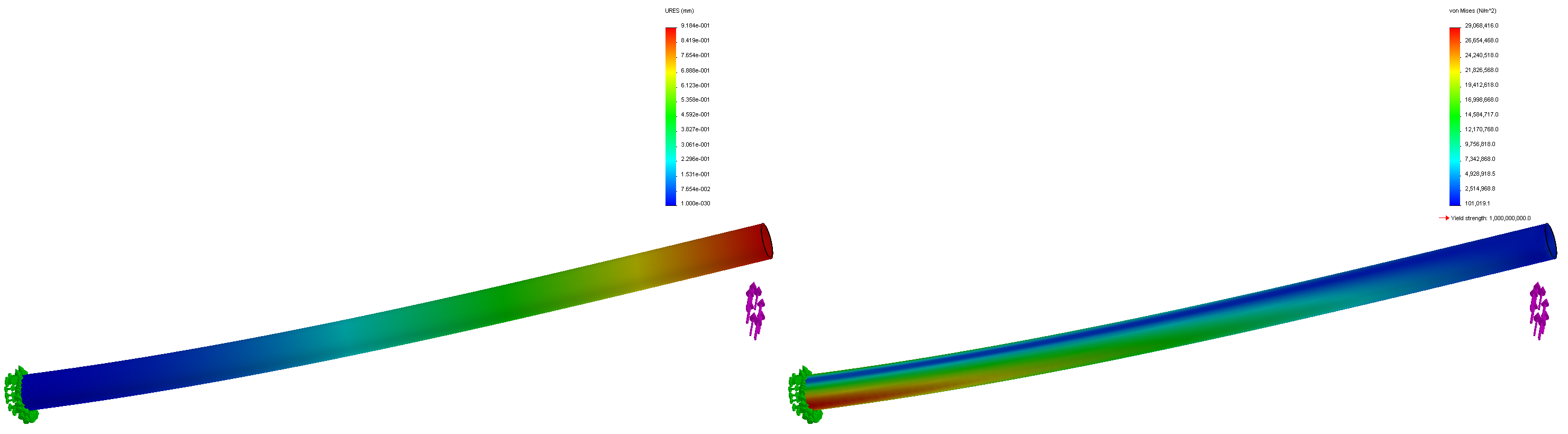
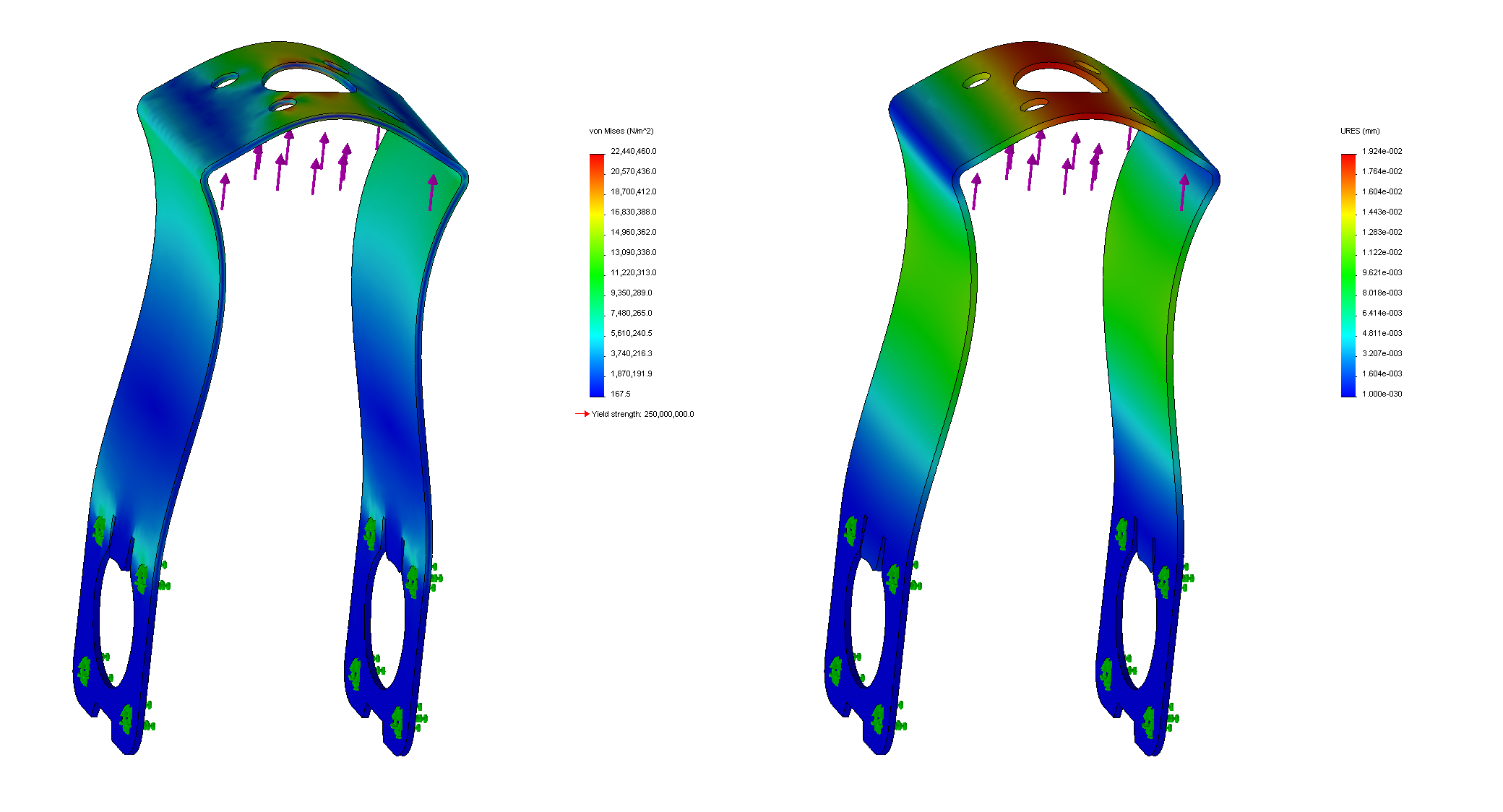
From finite element analysis, the transverse deformation under a 1 N load is 0.04 mm. Using this, we can find the critical frequency in the transverse direction:

This is entirely within the operating range of the rotor, so even if the rotor was slightly off-center, it could cause an excessive buildup of vibration.
Right now the quadrotor is out of commission because one of my friends took the battery to Toronto and I have never seen him since. So the quadrotor is sitting on a bookshelf in my basement. With commercial drones being really cheap nowadays, it might not be cost efficient to resurrect Quaffle.