The performance of Gadget
The above video, kindly created by Anson of Team 4 (Party Van), demonstrates our robot's usual performance.
Scroll down for awesome photos and video captured by the Team of Gadget.
Speed
Gadget is capable of lapping the inner track in 11 seconds and the outer track in 12 seconds. The only robots that are consistently faster are Adiabatmobile: 8 seconds; and Elvis: 10 seconds. Other fast robots include Party Van and Fishbike.
Obstacle avoidance
Gadget is capable of detecting and obstacles around 30 cm ahead of it. Usually, lane changing and obstacle avoidance works, if the rangefinder works. However, the rangefinder is sometimes affected by extraneous infrared noise (despite our many measures to combat this), leading to erroneous and inappropriate lane changes that ultimately result in failure.
Race results
Unfortunately, a series of unfortunate events resulted in Gadget's elimination in the first round of the race. Gadget was scheduled to compete at the very start of the event. Although in the moments before the race (i.e. around 1 minute before) Gadget successfully completed a test lap, in the first race a short circuit on the TINAH board prevented Gadget from moving. Even though the opponent was clearly unable to tape-follow and fell off the table immediately after going in a straight line, the judge prematurely adjudicated the race in favour of our opponent in the interest of avoiding boring the audience in the first race.
In the second race, a combination of poor ambient conditions resulted in oversensitivity of the rangefinder, leading to failure. Possible causes include the IR beacons, which operate on the same wavelength as the rangefinder (but are very strong), and autofocus-assist lamps on inferior point-and-shoot cameras. The loss of the second race resulted in elimination from the tournament.
After the race, we unplugged the rangefinder and Gadget ran about a hundred successful test laps, impressing the audience.
Marks
Unfortunately, a series of unfortunate events almost as bad as in the race happened just before the Time Trials, which count for 25% of the mark. So, in combination with our bad luck in the competition, we ended up getting a mark that's at the bottom 1/4 of the class even though Gadget is the top 1/4 performing robot. I guess this isn't so unfair, because if it was a real engineering project and we had to present it to some company, they wouldn't care how well it performed before the presentation; they just care about the presentation itself. A harsh lesson to learn!
Some say that this course, PHYS253, is not all about marks, but rather about the learning experience. Indeed, we have all learnt a lot from this course. Also, given that one of the team members (Daniel) is only 16 years old and another team member (Russell) doesn't have access to a computer (though he has three Blackberry phones), we did quite well! Ironically, Daniel did most of the design, and Russell did most of the programming.
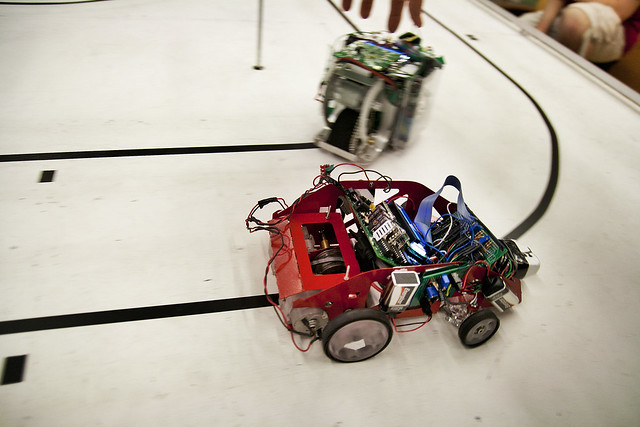
Photos
In addition to basically designing the whole robot, Daniel has also found plenty of time to walk around taking photos and playing online chess (he doesn't like to admit the latter, probably because he lost too many games of one-minute bullet chess). Below are Daniel's photos and some 3D renders, in reverse chronological order (i.e. newest first).
Video

More video to come soon! Billy, who took 16 gigabytes of full HD (1080p) video during the competition, is currently suffering from either depression due to our bad luck or is having too much fun in Hawaii, or is still recovering from a terrible knee injury that happened while he was trying to cycle the Tour de Vancouver Island. In either case, he is unable to process or upload the video.